南方科技大学继续教育培训
 咨询电话:
咨询电话:400-0815-589
欢迎来到继续教育培训网院校库!
继续教育培训网首页
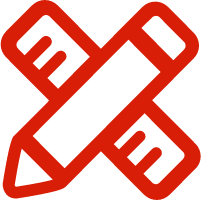
咨询电话:近日,南方科技大学机械与能源工程系副教授王宏强团队在机器人领域期刊IEEE Transactions on Robotics (T-RO)上发表了一篇关于静电吸附力反馈VR手套的研究论文。 论文题为 “ So-EAGlove: VR Haptic Glove Rendering SoftnessSensation With Force-Tunable Electrostatic Adhesive Brakes”。 通过引入反馈控制机制,实现了静电吸附力的精确且快速的控制,并且将其应用在VR手套中,能够在极小的空间和重量的前提下,模拟超大软硬度范围的不同力感。

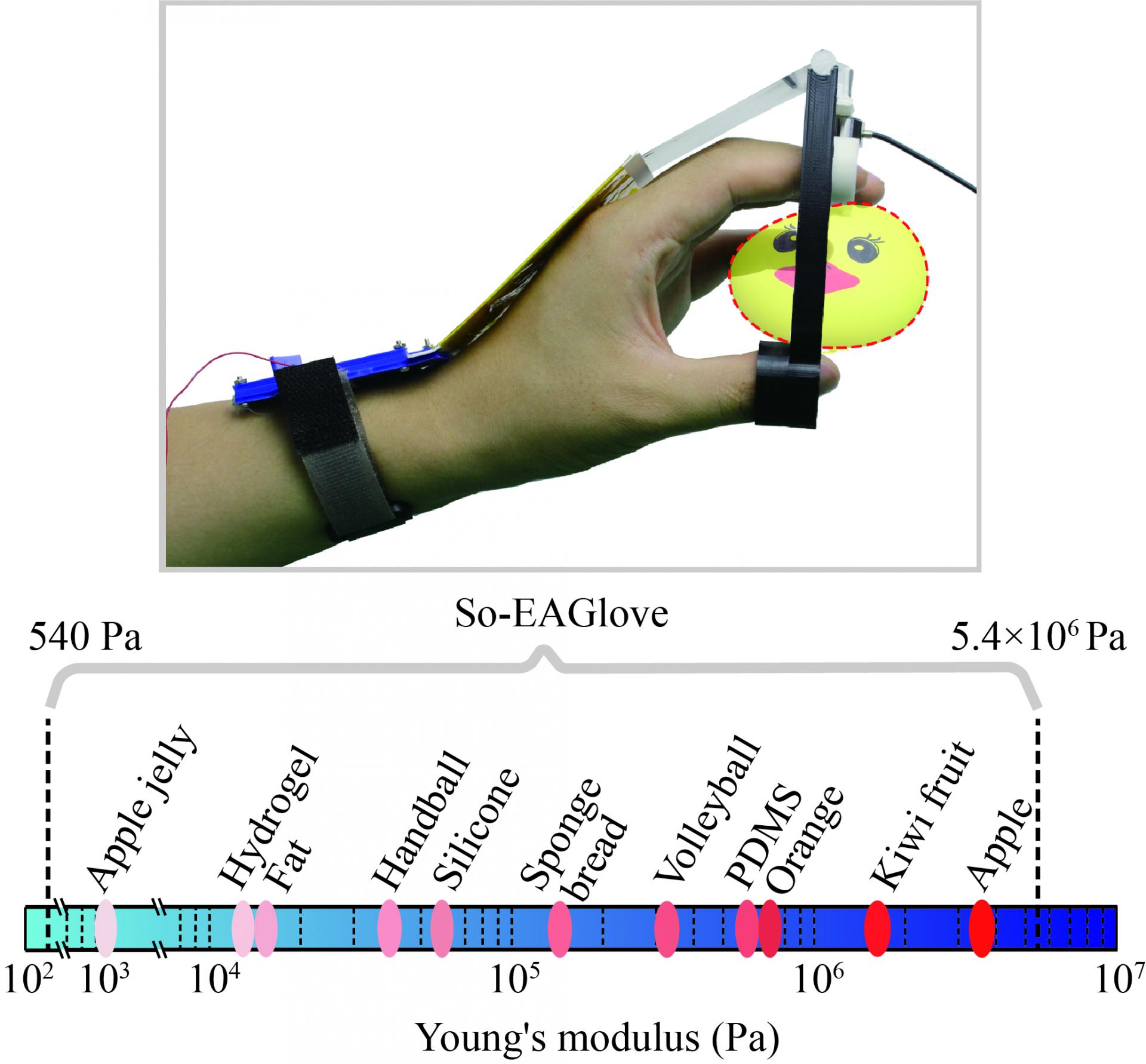
图1 静电吸附力反馈手套So-EAGlove所能模拟的物体杨氏模量范围
虚拟现实和元宇宙的概念成为了当下的研究热点,虚拟现实在娱乐,医疗和教育等领域发挥越来越大的作用。虚拟现实设备包括VR眼镜和VR手套等,目前的VR手套往往只有数据采集功能而不能提供触觉反馈,但触觉作为人类感知外部环境的重要手段,是进一步提高VR沉浸感和真实性的重要途径。基于此,很多学者致力于触觉反馈VR手套的研究,但是目前的触觉反馈VR手套存在系统繁杂,重量大,价格昂贵,耗能高等缺点,严重限制了触觉反馈VR手套的实际应用。近些年,静电吸附技术在外骨骼机器人,微型机器人,爬壁机器人等领域崭露头角,体现了独特的优势。但是目前静电吸附技术还存在一些问题,例如力大小难以控制以及电压过高的问题,限制了它的应用前景。
因此,该研究的主要目标是采用闭环反馈的控制方法实现静电吸附力的精确和快速控制,并基于此研制一种轻便,低耗能,低成本的触觉反馈VR手套。基于提出的控制方法,大大改进了之前开环控制的准确性,并有效提高了响应速度。在此基础上,引入赫兹接触力模型,并且利用模型计算出接触力的趋势,进而控制静电吸附力跟随理论接触力,最终达到模拟人手抓握不同物体的触觉。同时采用新型介电材料,大大降低了所需的电压,使得系统更加安全可靠。整个VR手套的重量仅为51克,功率仅约为2.43毫瓦。
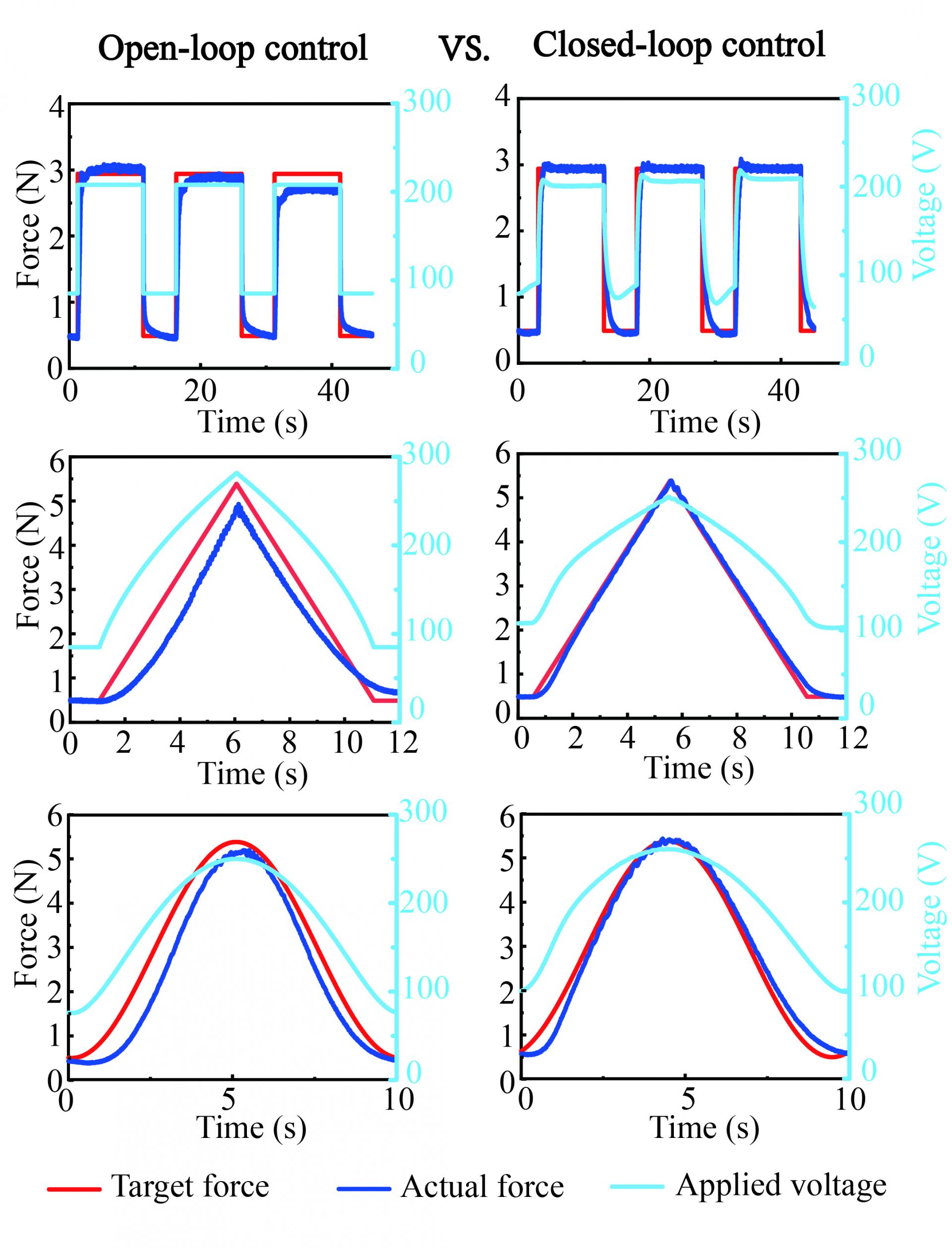
图2文中的控制方法实现了静电吸附力的精确控制
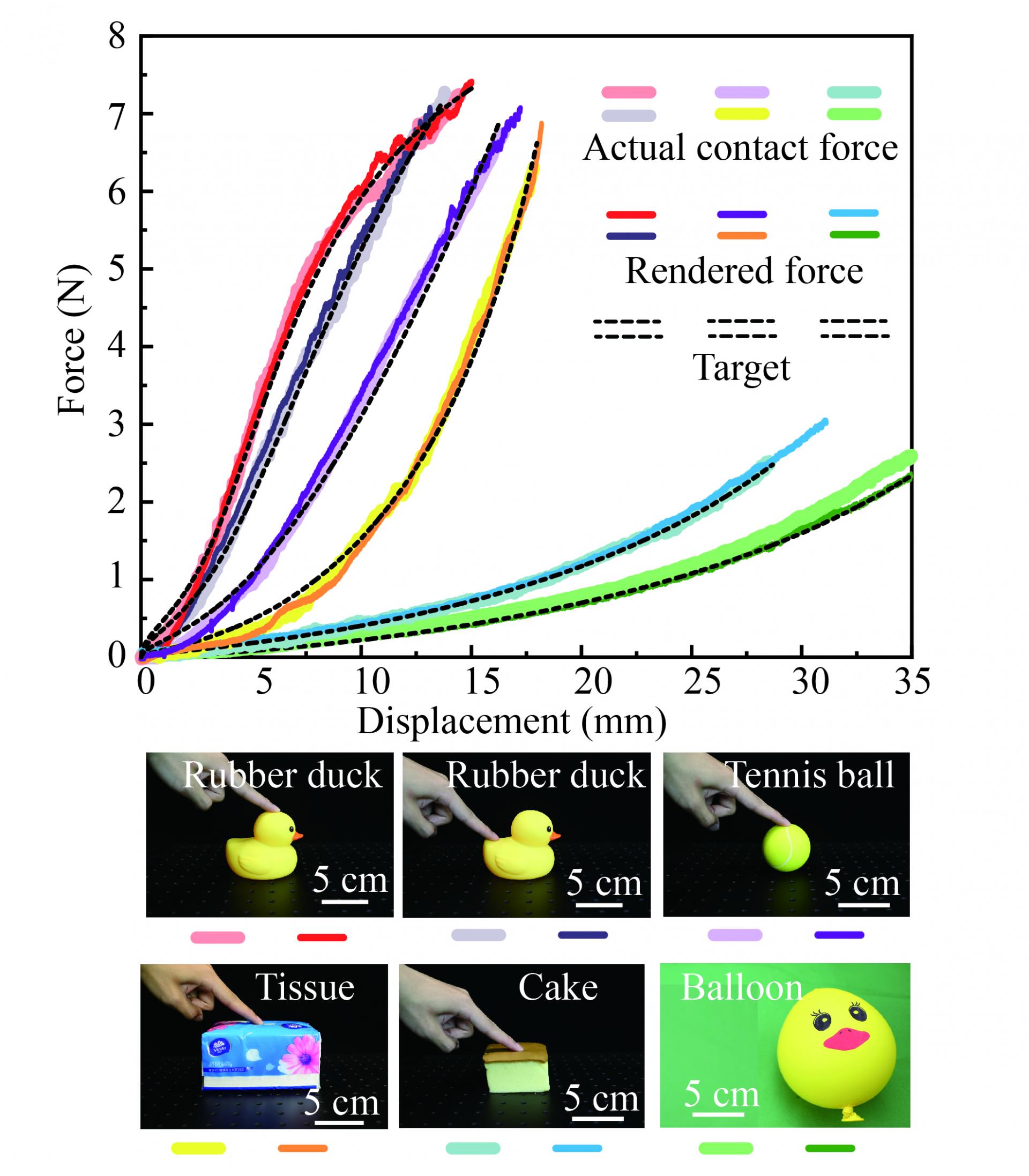
图3 文中的控制方法实现了对于不同物体的反馈力的模拟。

图4受试者穿戴So-EAGlove手套系统实验
研究者还进行了系统的实验,将手套给多位受试者穿戴,通过该触觉反馈手套,受试者能够准确感知到模拟物体的刚度不同,准确率高达90%,并且在真实性评分中,该VR触觉反馈手套的效果与人手抓握真实物体的效果没有显著区别。这一研究发现,有效解决了静电吸附力准确控制的问题,静电吸附在人机交互领域的系列问题,具有很强的理论和工程意义。
该论文由南方科技大学独立完成。南方科技大学机械与能源工程系研究助理熊泉(现为新加坡国立大学博士生)为论文第一作者,2019级硕士研究生梁轩铨、2021级硕士研究生王华岑等人为共同作者,通讯作者为王宏强,南科大为论文第一单位。该项目由国家自然科学基金、广东省自然科学基金等资助。



 渝公网安备 50010602502578号
渝公网安备 50010602502578号