咨询电话:
咨询电话:400-0815-589
欢迎来到继续教育培训网院校库!
继续教育培训网首页在7月27日闭幕的第41届中国控制会议(The 41th Chinese Control Conference, CCC2022)上,同济大学电子与信息工程学院控制科学与工程系博士研究生王肖宇、吕梓亮与导师董怡研究员合作的论文“A Unified Approach for Safety Critical Control Problem via Output Regulation Theory and Barrier Function”荣获第28届“关肇直奖”。“关肇直奖”每年从中国控制会议全世界所有投稿中选出1-2篇论文授奖,是目前我国控制理论界最高水平的青年学术奖项之一。这是首次由同济大学的在学研究生获得此奖项。

导师董怡研究员表示,同济学生此次在控制领域顶级会议上获得这一重要奖项,是同济大学控制工程、智能科学与技术等多学科交叉合作成果的体现,也是与上海自主智能无人系统科学中心交叉合作的结晶。科学中心引进了一批优秀海内外著名学者,形成了一流的研究力量,并在智能感知、智能芯片、单体发育、多体协同等领域产出了一批有影响力的创新成果。今后团队将依托电信学院与科学中心的交叉平台,持续推进多学科融合的科学研究,深化产教融合人才培养,面向科技前沿问题和国家重大需求,为智能制造、智慧城市、智慧医疗等社会发展多方面综合需求培养紧缺人才贡献力量。
第一作者王肖宇是同济大学2020级控制科学与工程专业的直博生,在导师的指导下主要研究非线性系统的安全控制问题。此次获奖的论文主要针对智能无人系统物理层面状态安全问题,基于输出调节理论和控制障碍函数构造性能指标函数,设计安全攸关控制策略解决系统轨迹安全与渐近跟踪问题,并进一步讨论了当安全性与跟踪无法同时完成时解决多目标控制问题的基本思路,在机器人、智慧物流等领域有着广泛的应用前景。

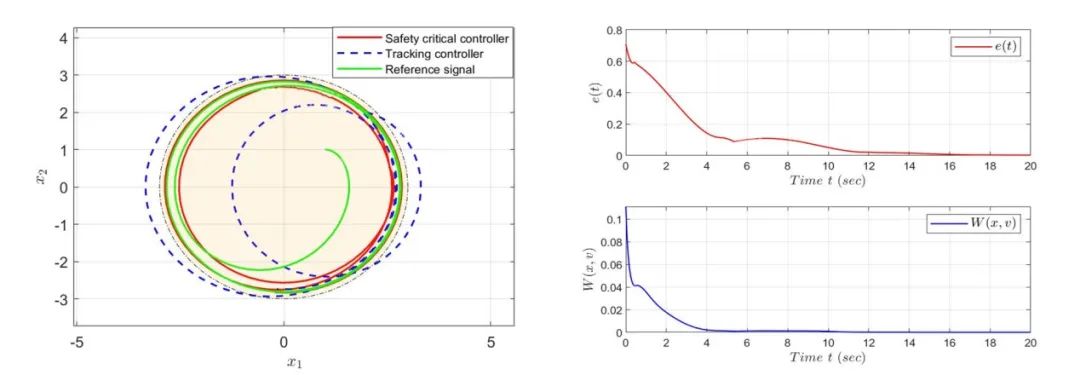
实验结果图(non-conflicted case)
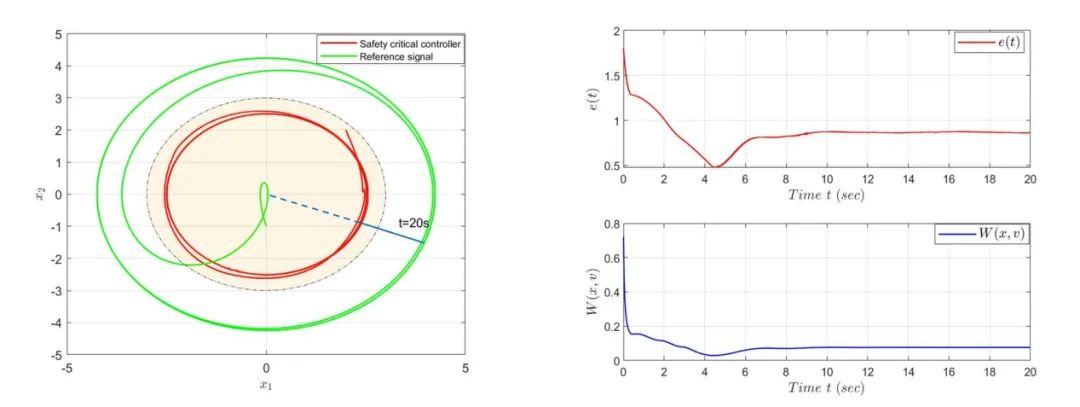
实验结果图(conflicted case)
据介绍,本届中国控制会议共收到来自国内外学术论文2000余篇,在众多申请者中,经过多轮严格的专家通讯评审和会议评审,5篇论文入围最终答辩环节。最终,经过评奖委员会不记名投票评选,王肖宇、吕梓亮与董怡合作的论文获得本届“关肇直奖”。
“关肇直奖”是为鼓励从事系统控制理论及其应用的青年科技人员做出国际一流成果,推动控制科学发展,同时缅怀和纪念为推动我国控制理论及其应用的发展作出重要贡献的关肇直教授而设立的奖项。关肇直教授是中国科学院院士、国内外知名的数学家和控制理论专家,他一生致力于数学、控制科学和系统科学的研究和发展,并为此作出了重要贡献。



 渝公网安备 50010602502578号
渝公网安备 50010602502578号